
TurtleBot 的 目的是给入门级的机器人爱好者或或从事移动机器人编程开发者提供一个基础开发平台,让他们直接使用TurtleBot自带的软硬件,能专注于应用程序的开 发。避免了设计草图,购买、加工材料、设计电路、编写程序、组装等一系列工作。借助该机器人平台,可以节省很多前期工作,只要根据平台的软硬件接口,就能 开发出所需的功能。

TurtleBot2移动机器人平台
TurtleBot(二 代)的硬件主要有TurtleBot 2的硬件主要有Yujin Kobuki移动底座、Kinect视觉传感器、华硕双核笔记本、2200mAh(或4400mAh)电池和可装卸的结构模块;使用著名的 ROS(Robot Operating System )作为操作系统,能实现3D地图导航、跟随等功能。
组成
关于Yujin Kobuki (可独立出售)
Yujin Kobuki是Yujin公 司开发的移动机器人平台,机器人接口控制板有32个内置传感器,两个驱动轮,2个车辘共四个可移动小轮,110度/秒单轴陀螺仪,一个预排程序的行为编码 器,一个可以扩大的输入输出端口和一个后挡板。开放式接口可以直接实现对机器人的移动,声音,以及显示,输入传感器的操作。
关于ROS(Robot Operating System )
ROS是一个机器人开源操作系统,由斯坦福大学人工智能实验室在2007年研发,后由WillowGarage推广维护。2012年 底,WillowGarage市场化运作后改有Opensource Robotics Foundation 进行维护。ROS主要提供硬件驱动、函数库、可视化编程、信息交互、软件打包等功能。更多介绍,请查看 ROS 官方文档。
关于Kinect
Kinect 是微软在2010年6月14日对XBOX360体感周边外设正式发布的名字,是一种3D体感摄影机(开发代号“Project Natal”),同时它导入了即时动态捕捉、影像辨识、麦克风输入、语音辨识、社群互动等功能。玩家可以通过这项技术在游戏中开车、与其他玩家互动、通过 互联网与其他Xbox玩家分享图片和信息等。Kinect已多次应用于机器人开发,实现3D导航等功能
配置参数
移动底座参数
载荷重量:
最大移动速度:
最大角速度 :
编码器:
编码器精度:
单轴航向陀螺:
电源:大容量镍氢电池:
充电适配器:
供电接口:
5kg
65cm/s
180deg/s
52线/转
11.7ticks/mm
110deg/s
2200mA
100-240VAC,50-60Hz,1.5A MAX
Output:18.6VDC,3.16A
5V/1A, 12V/1.5A, 12V/5A
视觉传感器参数
水平视角:
垂直视角:
深度范围:
深度数据流:
彩色数据流:
操作系统:
57º
43º
0.5-40m
320×240 16位,30帧/秒
640×480 32位,30帧/秒
ROS(Robot Operating System)操作系统(开放源码SDK)
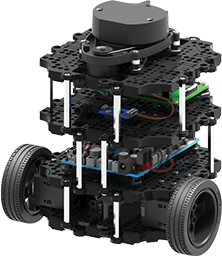
Burger
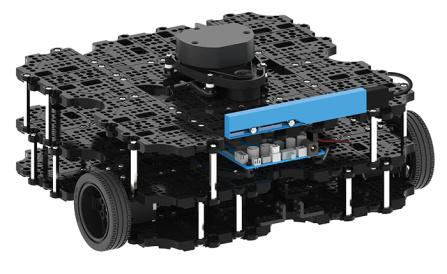
Waffle Pi
Turtlebot3(简称TB3)是继Turtlebot2之后,又一款ROS官方打造的基于kinetic的软硬件学习平台,更小,更便宜,更好玩.
- TurtleBot3是一个小型,低成本,完全可编程,基于ROS的移动机器人。
- 它旨在用于教育,研究,产品原型和爱好应用的目的。
- TurtleBot3的目标是大幅降低平台的尺寸和价格,而不会牺牲性能,功能和质量。
- 由于提供了其他选项,如底盘,计算机和传感器,TurtleBot3可以通过各种方式进行定制。
- TurtleBot3意愿通过应用SBC(单板计算机),深度传感器和3D打印的新技术进步,成为创客运动的中心。
TurtleBot3有两种不同的型号:burger和waffle Pi
如左图所示:
配置参数
TurtleBot3 Burger核心硬件:
– 1x Burger 款机壳组
– 2x 智能马达: XL430
– 1x 控制器(ROS): OpenCR控制器
– 1x 锂电池/充电器组(11.1V, 1,800mAh)
– 1x 连接线组
– 1x SBC 单板电脑: Raspberry Pi 3 树莓派3 开发板
– 1x 雷射测距仪
– 1x MicroSD 8G 记忆卡
– 1x 组装工具组
Turtlebot3 Waffle Pi核心硬件:
1x Waffle Pi 款机壳组
2x 智能马达: XM430
1x 控制器(ROS): OpenCR控制器
1x 锂电池/充电器组(11.1V, 1,800mAh)
1x 连接线组
1x SBC单板电脑: Intel Joule 物联网开发板
1x 雷射测距仪
1x Intel Realsense R200 深度感测摄影机
1x 组装工具组