

MOVO 移动机械手
Kinova MOVO 移动机械手系列旨在帮助研究人员使他们能够发现创新的方法和应用的移动操作。我们的解决方案可为您提供性能、可扩展性、模块化、可配置性和开放性的独特组合。我们已经设计和开发了它们全部使用ROS,连同MOVEIT!和GaseBo,以及应用程序编程接口(API),为您的研究团队提供机器人领域的先进的功能。
应用
有我们签名的Kinova Movo 移动机械手使用了内部地图创建来引导其自主导航的能力。该平台包含先进的传感器,提供辅助遥控操作,使你驾驶它担心碰撞。标准化定位和测绘(SLAM)能力也允许高性能的测量和易于使用。连接您的移动机械手通过以太网,HDMI,USB或WiFi,并开始发现创新的方法和应用程序的移动操作。
产品组成部分
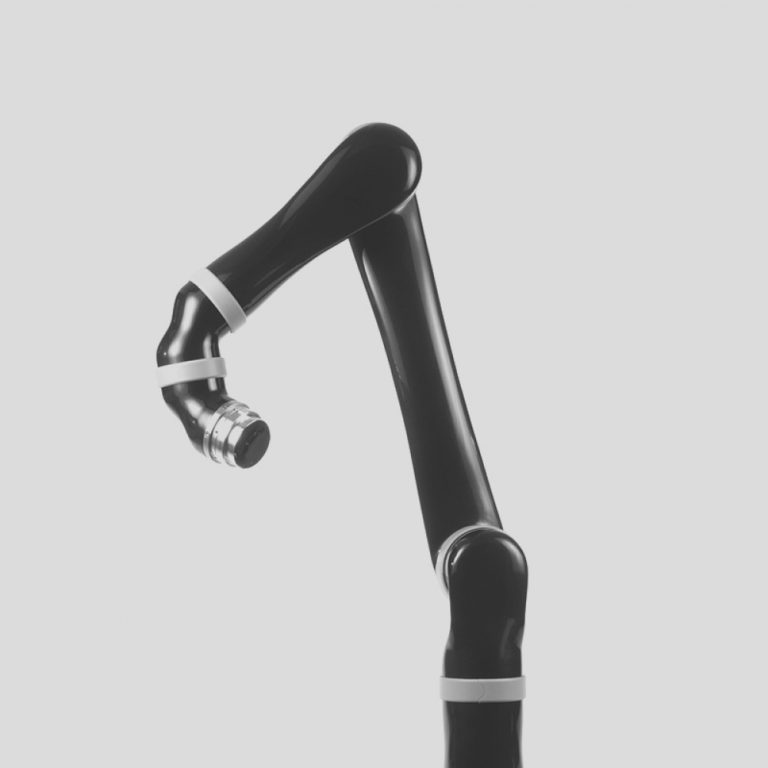
轴
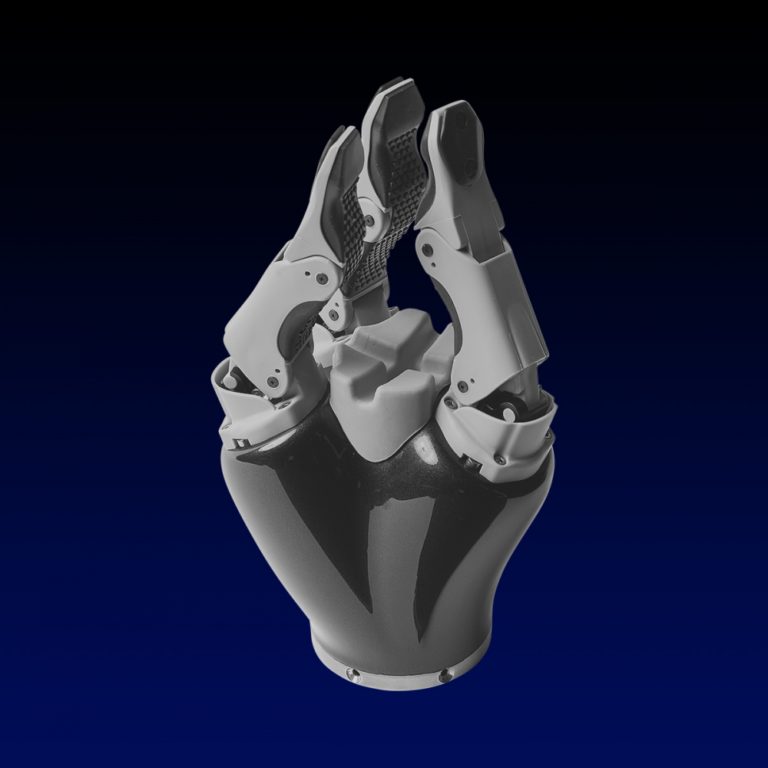
夹持器KG-3
夹持器KG-2

优势
Kinova Movo移动机械手汇集了先进的ROS本地MOVEIT!移动操控软件和GaseBo机器人仿真软件,集成到其开放的高端硬件中,给你两全其美体验。可以节省你宝贵的时间和精力来提高你今天的研究主题。