Omni Stereo—全向相机
Omni Stereo结合两个全向相机的力量,它是一个紧凑的,高帧率,全功能的全方位视频和深度传感器。非常适合于车辆和机器人定位、障碍物检测和自由空间估计。
3.6原始视频
60赫兹同步视频捕获
实时360度全景图
兼容opencv和ROS
C,C++的开源SDK
Windows 7, 8, 10和Linux 3
特点
全方位立体声给你十个同步和校准的图像流运行多达60 fps,安排为五立体对,所以你得到全景视频以及深度。
应用程序包括三维重建,障碍物检测,自由空间估计,地面平台跟踪,以及许多其他。全方位立体声提高了全方位60,让您立即访问深度信息除了原始全景数据,使其成为一个更好的选择,各种机器人和车辆定位应用程序。
作为靛蓝的一部分,主机进行立体声匹配(原始的或中间的阶段,如可校正的图像也可以读取)。SDK版本2包括一个CPU / SSE块匹配实现,在所有五个传感器对上同时运行20 fps(在一个好的笔记本系统上)。
靛蓝SDK的理念是赋予用户很大的控制权。你可以阅读原始图像数据在60帧(十个人的图像,或5×2平铺图像),校正的图像对,差距/深度图像,或点云。相机出厂校准,原始校准数据可通过SDK,相机可以重新校准包括靛蓝工具软件。
可用的模型:omnis5u3mt9v022m(单色),omnis5u3mt9v022c(彩色)。
配置参数
| 模型 | OMNIS5U3MT9V022M | OMNIS5U3MT9V022C |
| 分辨率 | 3.6 MP (10x 752x480) | 3.6 MP (10x 752x480) |
| 最大帧速率 | 60 FPS | 60 FPS |
| 水平视角 | 360° | 360° |
| 垂直视角 | 58° | 58° |
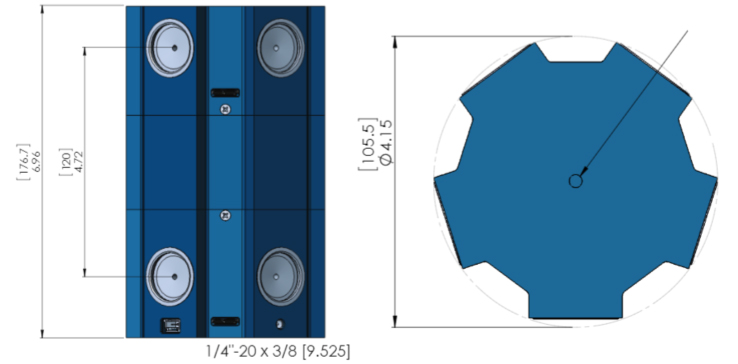
| 基线 | 4.72″ (12cm) | 4.72″ (12cm) |
| 接口 | USB3 | USB3 |
| 最大电缆长度 | 15 feet (included) | 15 feet (included) |
| 颜色 | 单色 | 彩色 |
| 传感器 | 10x Aptina MT9V022 | 10x Aptina MT9V022 |
| 触发输出 | Yes | Yes |
| 手动曝光控制 | Yes | Yes |
| 自动曝光控制 | Yes | Yes |
| 手动增益控制 | Yes | Yes |
| 自动增益控制 | Yes | Yes |
| 混合 | CPU and GPU implementations (OpenGL) | CPU and GPU implementations (OpenGL) |
| 拼接 | Precalibrated; presets selectable during operation | Precalibrated; presets selectable during operation |
| 镜头 | 10x 2.8mm F2.0 | 10x 2.8mm F2.0 |
| 直流输入(可选) | 5 VDC input | 5 VDC input |
| 功率消耗 | 800mA | 800mA |
| 操作系统支持 | Windows 7, 8, 10, Linux 3.x+ | Windows 7, 8, 10, Linux 3.x+ |
| GPIO | 1 input, 1 output, ground | 1 input, 1 output, ground |
| 宽 | 4.1″ | 4.1″ |
| 高 | 6.96″ | 6.96″ |
| 重 | 39.8 oz (1128 g) | 39.8 oz (1128 g) |
尺寸