

实验室建设方案
出于安全性、开源、接口丰富等优点的考虑,我们采用协作机械臂来构建该实验室,提供基于ROS系统的开源功能包,可展开关于机械臂动力学和运动学的研究、机械臂运动轨迹规划的优化问题的研究、机械臂结合夹爪的抓取控制的研究、双臂协同运动控制的研究等。
ROS是开源的,用于机器人开发的一种后操作系统。它提供类似操作系统所提供的功能,包含硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间的消息传递、程序发行包管理,同时也提供一些工具程序和库用于获取、建立、编写和运行多机整合的程序。
ROS的运行架构是一种使用ROS通信模块实现模块间P2P的松耦合的网络连接的处理架构,它执行若干种类型的通讯,包括基于服务的同步RPC(远程过程调用)通讯、基于Topic的异步数据流通讯,还有参数服务器上的数据存储。
实验室建设特点
- 点对点设计(降低数据计算压力,适应多机器人系统)
- 多语言支持(C++、Python、Octave和LISP等)
- 精简和集成(模块化设计,代码可单独编译;利用开源项目代码)
4.工具包丰富
5.免费及开源
机械臂分类
Universal Robots
Univeral Robots(UR)重新定义了工业机器人,灵活的工业机器人为生产的自动化,为企业实现自动化展现了全新的方向
到目前为止,许多企业因为传统的工业机器人体型庞大,价格昂贵,噪音大及在实施过程中缺乏灵活性,而不得不放弃了无数自动化任务和进程的实施计划
UR工业机器人突破障碍,机器人设计非常紧凑,而且不需要繁琐的安装及设置就可以迅速的融入生产线中,与员工交互合作。任何重复性的生产线过程中,都能够通过使用UR工业机器人并从中收益
Univeral Robots(UR)重新定义了工业机器人,灵活的工业机器人为生产的自动化,为企业实现自动化展现了全新的方向
到目前为止,许多企业因为传统的工业机器人体型庞大,价格昂贵,噪音大及在实施过程中缺乏灵活性,而不得不放弃了无数自动化任务和进程的实施计划
UR工业机器人突破障碍,机器人设计非常紧凑,而且不需要繁琐的安装及设置就可以迅速的融入生产线中,与员工交互合作。任何重复性的生产线过程中,都能够通过使用UR工业机器人并从中收益
产品参数
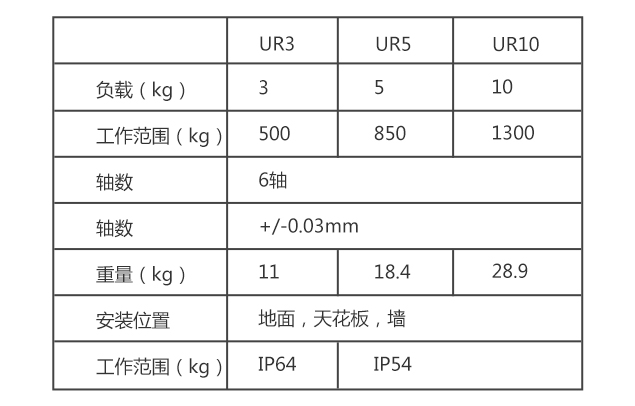
ABB YuMi

ABB最初开发YuMi是为了满足电子消费行业对柔性和灵活制造的需求,未来也将逐渐应用于更多市场领域。YuMi是一个协作的双臂组装解决方案,具有视觉和触觉,YuMi的双臂灵巧,并以软性材料包裹,同时配备创新的力传感技术,从而保障了人类同时的安全,安全体现在这台机器人的各种功能之中,使其可以在开放环境中工作。
产品参数
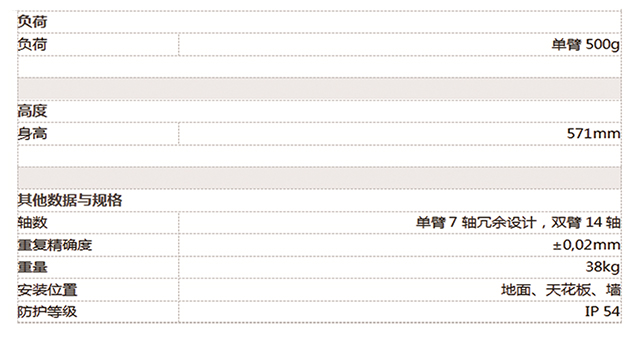
ABB YuMi

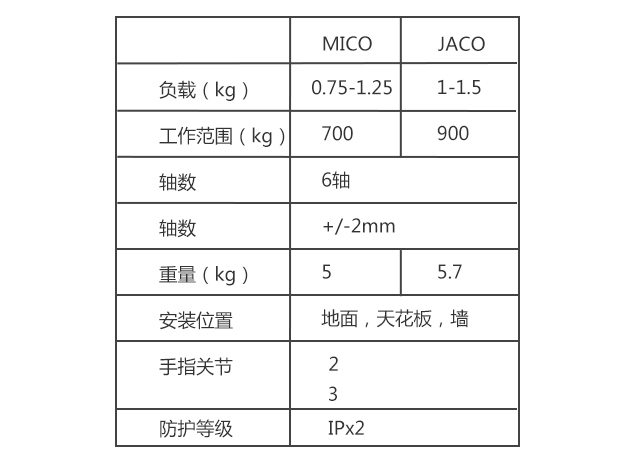
MICO两指轻量型机械臂由6个自由度的机械臂及二个自由度的手指型夹指组成,重量轻,控制简单,有着非常好的安全性及友好的人机交互。该机械臂每个关节集成了高扭矩的无刷直流电机,Harmonic Drive减速器,使用该臂的结构非常紧凑,每个关节都可以独立控制,冗余性的安全性控制及具有奇异的规避控制的算法使得该机械臂可以适合在各种不同应用领域,如智能轮椅,脑机接口,助老,助残,移动操控及科研教育领域。
Jaco 三指轻量型机械臂由6个自由度的机械臂及三个自由度的手指型夹指组成,重量轻,控制简单,有着非常好的安全性及友好的人机交互。
产品参数
实验室建设目的
构建以机械臂为主体的研究实验室,含括单臂、双臂、传感器等设备,方便师生展开关于机械臂相关的课题研究,基本满足绝大多数的研究需求。同时,也可基于此展开关于机械臂的操作、简易串口通讯、ROS系统、MoveIt轨迹规划等课程实验的教学任务,完善机器人学科的建设工作。