产品中心
机械臂
Franka七自由度机械臂(Panda)
COBOTTA桌面机械臂
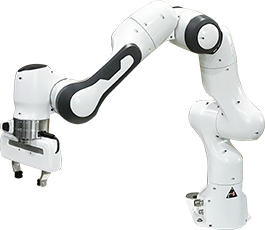
Gen3轻量型机械臂
GEN2轻量型机械臂
KUKA轻量型机械臂
Universal Robot
ABB YuMi 双臂智能协作机器人
MOVO 移动机械手
移动机器人
巡检机器人
紫外线消毒机器人
仿人机器人
Pepper仿人型智能机器人
仿人型双足NAO机器人
Tiago智能移动机器人
传感器
ATI 6维力传感器
单线激光雷达
多线激光雷达
SR4000 3D激光相机
防水型3D激光相机E70
Omni Stereo—全向相机
Basler ace —相机
SEKONIX NVIDIA DRIVE CAMERA- 相机
机器人末端
Robotiq 夹持器
Onrobot 夹持器&传感器
Onrobot RG2/RG6
电动真空夹持器VG10
OnRobot RG2-FT
壁虎夹持器 GECKO GRIPPER
HEX BOTTOM 传感器
ATI去毛刺工具
RightHand Robotics机械手
DLR/HIT Hand II五指机器人灵巧手
开源ROS复合机器人
室内移动抓取机器人
室外移动抓取机器人
室外多功能无人车实验室
Pilot Stars 无人驾驶套装
智慧农业机器人
解决方案
智能电厂巡检解决方案
紫外线消毒机器人方案
移动作业复合机器人
智能工厂物流解决方案
实训平台
综合工作站(带视觉)
装配工作站
去毛刺工作站
打磨工作站
教学培训工作站
焊接工作站
机器人实验室建设方案
移动智能抓取实验室
无人机实验室
机械臂实验室
空地协同研究实验室
地面无人车实验室
服务机器人实验室
机器人集成系统
Tortoise Manipulator集成方案
Bulldog-MZ集成方案
技术服务
新闻中心
联系我们
Select Page
jaco