
实验室建设方案:
出于安全性、开源、接口丰富等优点的考虑,我们采用协作机械臂来构建该实验室,提供基于ROS系统的开源功能包,可展开关于机械臂动力学和运动学的研究、机械臂运动轨迹规划的优化问题的研究、机械臂结合夹爪的抓取控制的研究、双臂协同运动控制的研究等。
ROS是开源的,用于机器人开发的一种后操作系统。它提供类似操作系统所提供的功能,包含硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间的消息传递、程序发行包管理,同时也提供一些工具程序和库用于获取、建立、编写和运行多机整合的程序。
ROS的运行架构是一种使用ROS通信模块实现模块间P2P的松耦合的网络连接的处理架构,它执行若干种类型的通讯,包括基于服务的同步RPC(远程过程调用)通讯、基于Topic的异步数据流通讯,还有参数服务器上的数据存储。
特点
- 点对点设计(降低数据计算压力,适应多机器人系统)
- 多语言支持(C++、Python、Octave和LISP等)
- 精简和集成(模块化设计,代码可单独编译;利用开源项目代码)
- 工具包丰富
- 免费及开源
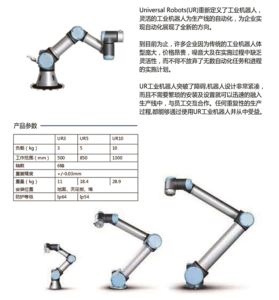
机械臂选型
UR机械臂
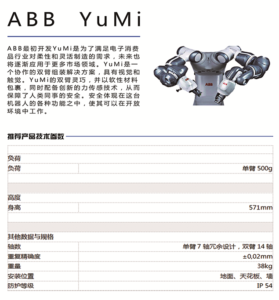
ABB YuMi机械臂
实验室建设目的:
构建以机械臂为主体的研究实验室,含括单臂、双臂、传感器等设备,方便师生展开关于机械臂相关的课题研究,基本满足绝大多数的研究需求。同时,也可基于此展开关于机械臂的操作、简易串口通讯、ROS系统、MoveIt轨迹规划等课程实验的教学任务,完善机器人学科的建设工作。