
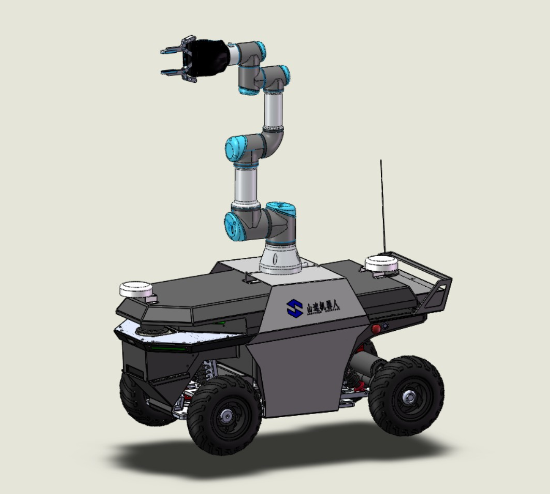
Collie(专业机器人)是一款可编程,模块化的全地形中型移动机器人开发平台 ,前轮采用阿克曼转向机构,前后双排独立悬挂,后轮差速驱动,保证了车辆转弯时,车体运行的平稳性。独立悬挂系统保证机器人在崎岖不平的环境中也具有良好的通过性和平稳性。
该机器人采用模块化设计,高性能的电源分布系统可以对外提供了5/12/24v直流输出,并对外提供USB,网口,HDMI 各种通讯接口及各个传感器的预留机械接口,使机器人易于集成多个传感器(如室内/室外激光、摄像头、3D摄像机、IMU)和各种执行器执行器(如轻型机械臂、立体视觉、云台装置。
前后轮采用直流伺服减速电机,及高性能的驱动板卡,及200线双里程计数器计保证运行控制的高精度。防水型设计保证该移动机器人在雨天或者泥泞的环境也能顺利运行。
特征
前转向移动平台
模仿汽车转向架构,前轮独立转向,后轮差速驱动,前后双排独立悬挂架构,保证了车辆转弯时的运行平稳性和在复杂环境中的良好通过性,是一款非常适合无人驾驶研究的小型移动平台。
开源平台
搭载开源的的ROS(Robot Operation System)机器人操作系统,提供ROS的API接口以及基础的建图、避障、导航等开发包;支持C++,Python等开发语言;可以深度部署Autoware/百度Apollo 开源自动驾驶框架。
定制化
机器人本体提供了各种扩展使用安装孔位,及各种传感器的接口,客户可以根据实际应用场景可接入差分GPS、惯导系统、双目摄像头、激光雷达、红外/超声波避障传感器等一系列传感器和机械臂等外部设备。
技术规格

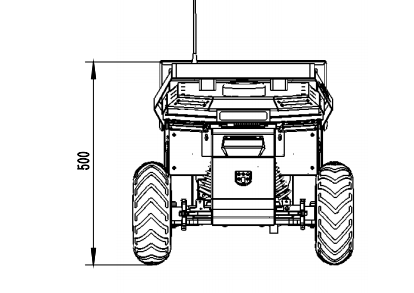
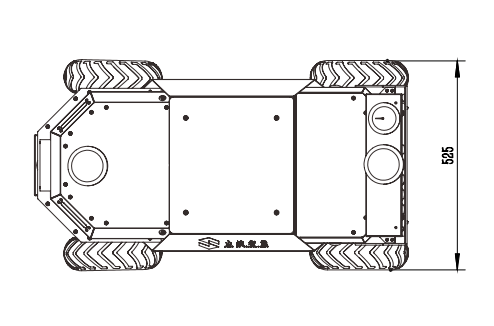
尺寸(L*W*H):
重量 :
最大负载:
最大速度 :
驱动/API:
工作时间 :
功率:
945*525*500mm
50kg
50kg
2.0m/s
ROS/Phthon/C++
3hrs typ/8hrs max
1000W Peak
电池:
防水等级:
最大爬坡角度:
编码器:
反馈:
控制模式:
通信:
48V 20Ah锂电
IP66
40°
200线/转
电池状态、运行状态
电压、速度、轮速
USB/Ethernet
配件

双光谱摄像机

RS-Lidar-16激光雷达

组合导航

远程数据传输
视频