
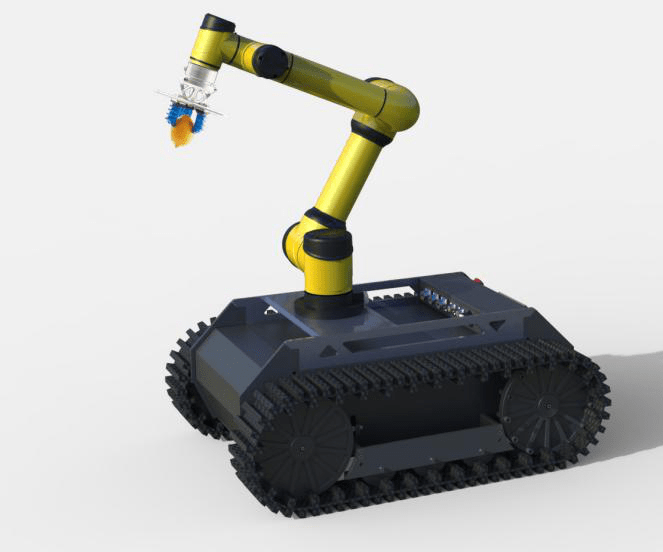
Buffalo是为采用了四轮全履带设计,特别适合沟壕,地塹的野外复杂地面环境运行。高达40度爬坡能力,让机器人具有很强的运动能力。可适用于安装探测、 移动操控、远程控制、清场排爆等特殊应用领域。
Buffalo编程系统除了适合工业应用的软件界面以外,也提供基于开放源代码的ROS机器人操作系统的版本。同时,丰富的机械臂,执行器及传感器接口API选项,让后续的集成更加简单、高效。
Buffalo采用高达IP66防水式设计,保证机器人在野外工作时,能抵御外界雨水侵蚀。同时,机器人模块化的设计理念,也提供了各种扩展使用安装孔位,及各种电源及传感器的接口,客户可根据非常方便根据自身需求进行扩展。
特征
全地形
采用强有力的四轮差速驱动系统(2*500W大功率伺服电机),适合全地形运动的轮胎及较高的底盘确保其可以满足各种崎岖地形路面的考验。IP66的防水等级确保其在野外雨天的环境也能很好的应用。
开源平台
搭载开源的的ROS(Robot Operation System)机器人操作系统,提供ROS的API接口以及基础的建图、避障、导航等开发包;支持C++,Python等开发语言;可以集成远程数据传输系统,对机器人经行远程实时操控。
定制化
机器人本体提供了各种扩展使用安装孔位,及各种传感器的接口,客户可以根据实际应用场景可接入差分GPS、惯导系统、双目摄像头、激光雷达、红外/超声波避障传感器等一系列传感器和机械臂(UR、AUBO、JAKA、ABB)等外部设备。
技术规格
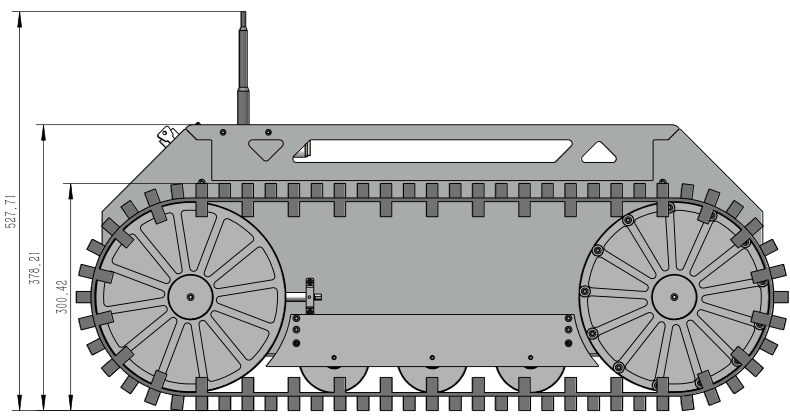
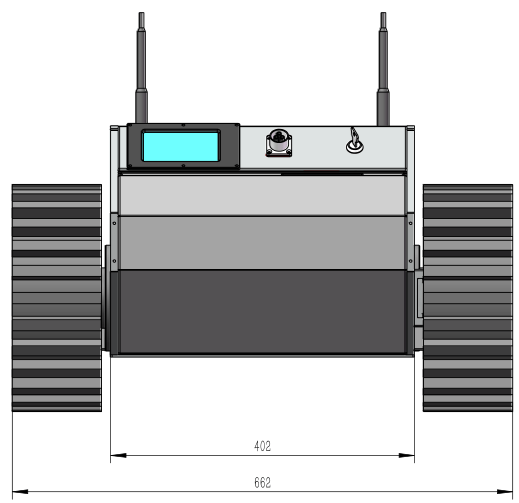
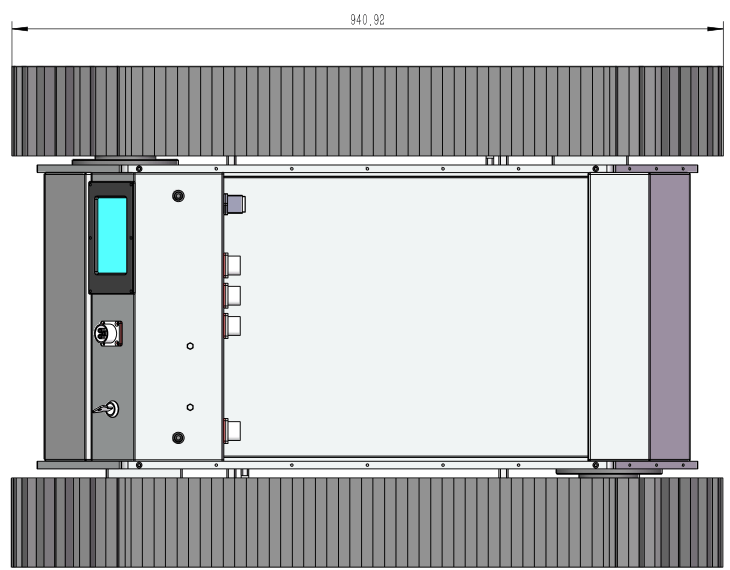
尺寸(L*W*H):
重量 :
最大负载:
最大速度 :
驱动/API:
工作时间 :
功率:
920*662*380mm
60kg
100kg
2.0m/s
ROS/Phthon/C++
3hrs typ/8hrs max
1000W Peak
电池:
防水等级:
最大爬坡角度:
编码器:
反馈:
控制模式:
通信:
48V 20Ah锂电
IP66
40°
200线/转
电池状态、运行状态
电压、速度、轮速
USB/Ethernet
配件

AUBO-I5

RS-Lidar-16激光雷达

组合导航

远程数据传输
履带机器人全地形展示
履带机器人负载测试